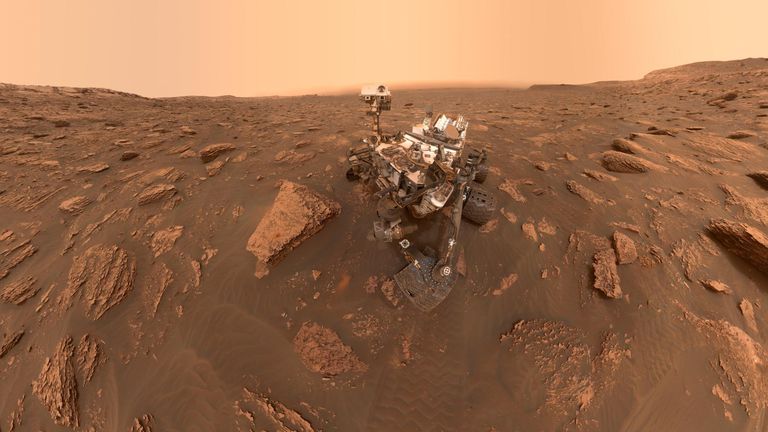
Iako ljudi još jedno vrijeme neće kročiti na Mars, već su ostavili trajni trag na tom Crvenom planetu. Sonde koje ispituju vremenske uvjete, seizmičku aktivnost, ali i traže vodu i tragove života, kreću se površinom planeta.


No, kretanje bilo čega na Marsu prilično se razlikuje od bilo čega na što smo navikli na Zemlji. A to najbolje zna inženjer koji je prije nešto više od godinu dana dobio tu čast da upravlja robotskim vozilom Curiosity po Marsovoj površini. Njegovo ime je Evan Hilgemann i u članku na Mediumu opisao je svoje iskustvo vožnje po Marsu.
Prva stvar koju treba imati na umu je da je Mars zaista jako daleko. Radio signal putuje i do 22 minute do Marsa, tako da je upravljanje u stvarnom vremenu nemoguća misija. Curiosity prima informacije sa Zemlje samo jednom dnevno, a ostatak vremena je prepušten sam sebi. No, rover sam donosi tek nekoliko odluka, ostatak je osmišljen na Zemlji, pojašnjava Hilgemann.
Rover mora moći sam donositi odluke upravo zato što je kontakt sa Zemljom ograničen. Ali u njegovom svijetu to znači da kad god naiđe na neki problem, zapravo stane i čeka upute sa Zemlje.
Kako objašnjava Hilgemann, glavni zadatak vozača rovera je brinuti se za njegovu sigurnost dok istražuje bespuća Marsa.
Svi NASA-ini roveri opremljeni su kamerama. Svaki set kamera stvara stereo sliku, što znači da mogu vidjeti u 3D baš kao što to vidimo mi očima. Postoje i kamere za opasnost na prednjoj i stražnjoj strani rovera, koje prepoznaju potencijalne opasnosti, te navigacijske kamere koje se nalaze na "jarbolu" kako bi mogli vidjeti malo dalje, objašnjava Hilgemann.
Za roverovo kretanje po Marsu potrebno je stvoriti 3D sliku površine i potom isplanirati putanju. Problem je što kamere vide samo 30-ak metara oko rovera, pa je i njegovo dnevno kretanje ograničeno na tu udaljenost.
Kad planiramo vožnju, moramo voditi računa o nekoliko stvari. Roverovo podvozje može izdržati prelazak preko kamenja koje je visoko do metra. Sve veće od toga mora se izbjegavati. Problem može biti i rahli pijesak, jer rover može zapeti u njemu. A poteškoće mogu stvarati i mali kamenčići koji su relativno oštri jer mogu oštetiti kotače, pojašnjava Hilgemann.
Nakon što isplaniraju sigurnu rutu, moraju odlučiti na koji će način rover navigirati po toj ruti. "Slijepa vožnja" podrazumijeva da rover u potpunosti prati upute koje su mu poslane sa Zemlje i ne prilagođava se okolini. Takvo je upravljanje najjednostavnije i najbrže, ali i najriskantnije pa se odabire samo kad je potrebno rover dovesti s jedne točke na drugu, a teren je relativno ravan. Drugi način vožnje je "vizualna vožnja", kad rover svakih nekoliko metara stana i uslika okolinu, a računalo analizira te slike i izračunava gdje se rover nalazi. Takva vožnja nešto je sporija od "slijepe", ali je puno preciznija. I na kraju "automatska vožnja" koja je najsličnija vožnji autonomnih vozila na Zemlji gdje roverove kamere konstatno snimaju, a računlo analizira fotografije i planira rutu. Ako procijeni da nema sigurne rute za daljnje napredovanje, čekat će upute sa Zemlje. Automatska vožnja ujedno je i najbrža, ali i najriskantnija, jer rover ne može sam procijeniti koliko je čvrsto tlo niti izbjeći male šiljate kamenčiće. Tako da se koristi samo u određenim scenarijima.
Kako ističe na kraju Hilgemann, Curiosityju bi se sredinom veljače 2021. na Marsu trebao pridružiti i Perseverance, još jedan rover koji će istraživati površinu tog planeta. Za razliku od Curiosityja, Perseverance ima nešto naprednije mogućnosti i jače instrumente, a osim što će istraživati svijet oko sebe, prikupljat će i uzorke s površine Marsa koji bi na Zemlju trebali doći u sljedećih desetak godina. No, dodaje, princip upravljanja i vožnje i za Perseverance će biti gotovo jednak Curiosityju - polako i oprezno, kako ne bi negdje zaglavio.